Kąty RPY

Kąty RPY – czyli kąty roll, pitch, yaw. Służą do wyrażenia chwilowych prędkości kątowych obracającej się bryły sztywnej. Są tworem teoretycznym podobnym do kątów Eulera.
- Roll - Przechył: obrót wokół osi podłużnej (łączącej nos z ogonem).
- Pitch - Pochylenie: obrót wokół osi poprzecznej (łączącej końcówki skrzydeł).
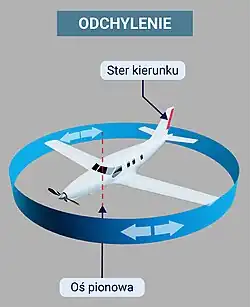
- Yaw - Odchylenie: obrót wokół osi pionowej.
Powstają poprzez kolejne rotacje względem układu bazowego, a nie lokalnego, jak to jest w przypadku kątów Eulera. Obracanie następuje kolejno względem osi x, y, z.
Roll (przechył)
Obrót wokół osi podłużnej obiektu, która zazwyczaj biegnie od jego przodu (nosa) do tyłu (ogona). W przypadku samolotu, przechył powoduje podniesienie jednego skrzydła i opuszczenie drugiego, inicjując zakręt lub korygując przechylenie boczne.
Pitch (pochylenie)
Obrót wokół osi poprzecznej obiektu, która w samolocie biegnie od jednej końcówki skrzydła do drugiej. Pochylenie powoduje uniesienie lub opuszczenie nosa obiektu względem horyzontu, co wpływa na kąt natarcia i tor lotu w płaszczyźnie pionowej[1].
Yaw (odchylenie)
Obrót wokół osi pionowej obiektu, prostopadłej do osi podłużnej i poprzecznej. Odchylenie powoduje skierowanie nosa obiektu w lewo lub w prawo, zmieniając jego kierunek w płaszczyźnie poziomej bez zmiany przechylenia czy pochylenia[2].
Zobacz też
Przypisy
- ↑ Aerodynamika II i mechanika lotu - Wyjaśnienie praw i zjawisk opisujących powstawanie siły nośnej, rozkład sił na płacie, zasady mechaniki lotu - zpe.gov.pl [online], zpe.gov.pl [dostęp 2025-04-20].
- ↑ Aerodynamika II i mechanika lotu - Wyjaśnienie praw i zjawisk opisujących powstawanie siły nośnej, rozkład sił na płacie, zasady mechaniki lotu - zpe.gov.pl [online], zpe.gov.pl [dostęp 2025-04-20].