Zapis wektorowy
W zapisie wektorowym wzory Freneta mają następującą postać




gdzie[1]:
 – parametr naturalny krzywej (długość łuku),
– parametr naturalny krzywej (długość łuku), – wektor wodzący punktu na krzywej,
– wektor wodzący punktu na krzywej, – wektor styczny,
– wektor styczny, – wektor normalnej głównej,
– wektor normalnej głównej, – wektor binormalny,
– wektor binormalny, – wektor krzywizny,
– wektor krzywizny, – promień krzywizny,
– promień krzywizny, – krzywizna krzywej,
– krzywizna krzywej, – promień torsji krzywej (promień drugiej krzywizny),
– promień torsji krzywej (promień drugiej krzywizny), – torsja krzywej (druga krzywizna),
– torsja krzywej (druga krzywizna), – wektory normalne płaszczyzn: ściśle stycznej i prostującej.
– wektory normalne płaszczyzn: ściśle stycznej i prostującej.
Z punktem  na krzywej przestrzennej
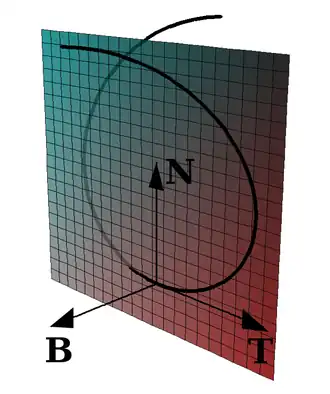
na krzywej przestrzennej  można związać dwa lokalne układy ortogonalnych osi liczbowych. Pierwszy z nich jest nieruchomy, prawoskrętny i określony przez wersory
można związać dwa lokalne układy ortogonalnych osi liczbowych. Pierwszy z nich jest nieruchomy, prawoskrętny i określony przez wersory  Drugi prawoskrętny układ wersorów
Drugi prawoskrętny układ wersorów  jest związany z krzywą i określa trzy istotne kierunki: styczny, normalny i binormalny. Dwa pierwsze wyznaczone są przez wersory
jest związany z krzywą i określa trzy istotne kierunki: styczny, normalny i binormalny. Dwa pierwsze wyznaczone są przez wersory
| |
 
|
|
(1.1) |
gdzie:
| |  |
|
(1.2) |
a trzeci jest definiowany[1] wzorem
| |
![{\displaystyle {\begin{aligned}\mathbf {b} &=\mathbf {t} \times \mathbf {n} ={\begin{vmatrix}\mathbf {i} &\mathbf {j} &\mathbf {k} \\x^{'}&y^{'}&z^{'}\\\rho x^{''}&\rho y^{''}&\rho z^{''}\end{vmatrix}}\\[1ex]&=\rho {\Big [}(y^{'}z^{''}-z^{'}y^{''})\,\mathbf {i} +(z^{'}x^{''}-x^{'}z^{''})\,\mathbf {j} \\[1ex]&\quad +(x^{'}y^{''}-y^{'}x^{''})\,\mathbf {k} {\Big ]}\\[1ex]&=\rho \,{\big (}A\,\mathbf {i} +B\,\mathbf {j} +C\,\mathbf {k} {\big )}=\rho \mathbf {H} .\end{aligned}}}](./d9f00eebe39b63c559b353f9f07e4abfdff7aeb2.svg)
|
|
(1.3) |
Jeżeli krzywa  leży na płaszczyźnie
leży na płaszczyźnie  o normalnej
o normalnej  to wektor binormalnej
to wektor binormalnej  do tej krzywej w każdym jej punkcie jest stały i
do tej krzywej w każdym jej punkcie jest stały i  Płaszczyzna jest w tym przypadku płaszczyzną ściśle styczną dla dowolnego punktu krzywej
Płaszczyzna jest w tym przypadku płaszczyzną ściśle styczną dla dowolnego punktu krzywej 
W analizie przestrzennych właściwości krzywych istotną rolę odgrywają pochodne wersorów krawędzi trójścianu Freneta.
Na podstawie wzoru (1.1) mamy
| |

|
|
(1.4) |
i różniczkując wzór (1.3), otrzymujemy
| |

|
|
(1.5) |
ponieważ i  są kolinearne. Ponadto z (1.5) wynika, że
są kolinearne. Ponadto z (1.5) wynika, że  a ponieważ również
a ponieważ również 
więc
| |

|
|
(1.6) |
gdzie  jest torsją krzywej w punkcie
jest torsją krzywej w punkcie  określoną wzorem (1.8).
określoną wzorem (1.8).
Teraz można już obliczyć pochodną normalnej głównej, korzystając ze wzoru 
| |
![{\displaystyle {\begin{aligned}\mathbf {n} ^{'}&=-(\mathbf {t} \times \mathbf {b} )^{'}=-\mathbf {t} ^{'}\!\times \mathbf {b} -\mathbf {t} \times \mathbf {b} ^{'}\\[1ex]&=-{\frac {1}{\rho }}\,\mathbf {n} \times \mathbf {b} -{\frac {1}{\tau }}\mathbf {t} \times \mathbf {n} \\[1ex]&=-{\frac {1}{\rho }}\,\mathbf {t} -{\frac {1}{\tau }}\mathbf {b} =-\kappa \mathbf {t} -T\mathbf {b} .\end{aligned}}}](./e70e4b3599a487d7c1c7d51d155e88f531065a3c.svg)
|
|
(1.7) |
Poniższa tabelka zawiera kosinusy kierunkowe wersorów Freneta osi stycznej, normalnej i binormalnej z kierunkami osi 
| x | y | z |
|  |  |  |
|  |  |  |
|  |  |  |
Wzory dla pochodnych wersorów Freneta zestawiono poniżej[1].
|  |  |  |
 |  |  |  |
 |  |  |  |
 |  |  |  |
Torsję krzywej można obliczyć, korzystając ze wzoru (1.6) po uwzględnieniu (1.1) i (1.5)
| |
![{\displaystyle {\begin{aligned}T&={\frac {1}{\tau }}=\mathbf {b} ^{'}\cdot \mathbf {n} =\\[1ex]&=(\mathbf {t} \times \mathbf {n} ^{'})\cdot \mathbf {n} ={\big [}\mathbf {t} \times (\rho \mathbf {N} )^{'}{\big ]}\cdot \rho \mathbf {N} =\\[1ex]&={\big [}\mathbf {t} \times (\rho ^{'}\mathbf {N} +\rho \mathbf {N} ^{'}){\big ]}\cdot \rho \mathbf {N} =\\[1ex]&=\rho ^{2}(\mathbf {t} \times \mathbf {N} ^{'})\cdot \mathbf {N} =-\rho ^{2}(\mathbf {r} ^{'}\times \mathbf {r} ^{''})\cdot \mathbf {r} ^{'''}=\\[1ex]&=-\rho ^{2}\;{\begin{vmatrix}x^{'}&y^{'}&z^{'}\\x^{''}&y^{''}&z^{''}\\x^{'''}&y^{'''}&z^{'''}\end{vmatrix}},\end{aligned}}}](./1f9e3cfc84a4f996623437f3e86de05b2b062972.svg)
|
|
(1.8) |
dzięki temu, że 
Torsja  określona w dowolnym punkcie krzywej wzorem
określona w dowolnym punkcie krzywej wzorem  stanowi pewną miarę zwichrowania tej krzywej w bliskim otoczeniu punktu
stanowi pewną miarę zwichrowania tej krzywej w bliskim otoczeniu punktu  Polega ono na wychylaniu się krzywej z jej płaszczyzny ściśle do niej stycznej w tym punkcie. Gdy torsja ma wartość zerową krzywa w otoczeniu punktu jest płaska, bez zwichrowania.
Polega ono na wychylaniu się krzywej z jej płaszczyzny ściśle do niej stycznej w tym punkcie. Gdy torsja ma wartość zerową krzywa w otoczeniu punktu jest płaska, bez zwichrowania.
Zapis parametryczny
Dana jest krzywa przestrzenna opisana parametrycznie równaniami[2]
| |

|
|
(1) |
Na tej krzywej wyróżnimy dwa punkty 
 odpowiadające dwom wartościom
odpowiadające dwom wartościom  parametru
parametru  Przez te punkty przechodzi sieczna opisana równaniem
Przez te punkty przechodzi sieczna opisana równaniem
| |

|
|
(2) |
Dzieląc mianowniki przez  i przechodząc do granicy
i przechodząc do granicy  otrzymujemy równanie linii stycznej do krzywej w punkcie
otrzymujemy równanie linii stycznej do krzywej w punkcie 
| |

|
|
(3) |
gdzie przez  oznaczono pochodne względem parametru liczone w punkcie
oznaczono pochodne względem parametru liczone w punkcie 
Równanie o postaci (3) jest konsekwencją kolinearności wektorów  i
i 
Równanie płaszczyzny normalnej  (prostopadłej) do krzywej w punkcie można zapisać w postaci[2] iloczynu skalarnego wektora stycznego do niej z dowolnym wektorem leżącym w płaszczyźnie
(prostopadłej) do krzywej w punkcie można zapisać w postaci[2] iloczynu skalarnego wektora stycznego do niej z dowolnym wektorem leżącym w płaszczyźnie
| |

|
|
(4) |
Równanie płaszczyzny ściśle stycznej  do krzywej w punkcie zapiszemy w postaci
do krzywej w punkcie zapiszemy w postaci
| |

|
|
(5) |
Problem polega teraz na tym, aby określić współrzędne  takiego wektora
takiego wektora  który byłby prostopadły do płaszczyzny ściśle stycznej
który byłby prostopadły do płaszczyzny ściśle stycznej 
Rozważmy równanie takiej płaszczyzny  na której leży styczna i która
na której leży styczna i która
- przechodzi przez punkt – a zatem każdy jej wektor jest prostopadły do

| |

|
|
(6) |
oraz
- każdy wektor
 leżący na płaszczyźnie
leżący na płaszczyźnie  jest prostopadły do
jest prostopadły do
| |

|
|
(7) |
Wektor  jest również prostopadły do wektora stycznego
jest również prostopadły do wektora stycznego  który leży na
który leży na 
| |

|
|
(8) |
Wykorzystując wzór Taylora zamiast (7), możemy napisać
| |

|
|
(9) |
gdzie 
Po uwzględnieniu (8) i (9) otrzymujemy
| |

|
|
(10) |
Można teraz z (8) i (10) wyznaczyć niewiadome  i na podstawie (6) otrzymuje się, po przejściu do granicy
i na podstawie (6) otrzymuje się, po przejściu do granicy 
| |

|
|
(11) |
Tak więc wektor  prostopadły do płaszczyzny ściśle stycznej ma współrzędne
prostopadły do płaszczyzny ściśle stycznej ma współrzędne
| |
 |
|
(12) |
Przez punkt krzywej przechodzą trzy wzajemnie prostopadłe płaszczyzny tworzące trójścian Freneta[3]:
- ściśle styczna (o wektorze normalnym
 ) – równanie (5) i (12),
) – równanie (5) i (12),
- normalna (o wektorze normalnym
 ) – równanie (4),
) – równanie (4),
- prostująca (o wektorze normalnym
 ) – prostopadła do dwu poprzednich. Jej równanie ma postać
) – prostopadła do dwu poprzednich. Jej równanie ma postać
| |

|
|
(13) |
Wektor  jest prostopadły do obydwu wektorów
jest prostopadły do obydwu wektorów  i
i  i dlatego muszą być spełnione dwa równania
i dlatego muszą być spełnione dwa równania
| |

|
|
(14) |
| |

|
|
(15) |
Rozwiązanie równań (13) i (15) ma postać wzorów
| |

|
|
(16) |
Krawędziami trójścianu Freneta są proste:
- styczna – o wersorze i równaniu (3),
- normalna główna – o wersorze i prostopadła do płaszczyzny prostującej, określona równaniem
| |

|
|
(17) |
- binormalna – o wersorze i prostopadła do płaszczyzny ściśle stycznej, określona równaniem
| |

|
|
(18) |
Zachodzą przy tym następujące tożsamości
| |
 (lub (lub  ), ),
|
|
(19) |
| |
 (lub (lub  ). ).
|
|
(20) |
- Krzywizna i torsja krzywej
Płaszczyzna normalna do krzywej w jej punkcie  opisana jest równaniem
opisana jest równaniem
| |

|
|
(21) |
gdzie  jest wektorem stycznym do krzywej w punkcie
jest wektorem stycznym do krzywej w punkcie 
Przecina ona normalną główną (17) w punkcie  o współrzędnych
o współrzędnych
| |

|
|
(22) |
Po podstawieniu (22) do (21) i uwzględnieniu (15) otrzymujemy wartość parametru
| |

|
|
(23) |
określającą położenie punktu na kierunku normalnej głównej.
Po podzieleniu licznika i mianownika przez i po przejściu do granicy otrzymujemy
| |

|
|
(24) |
Gdy punkt  dąży do punktu punkt dąży do punktu
dąży do punktu punkt dąży do punktu  o współrzędnych
o współrzędnych
| |

|
|
(25) |
Po wykorzystaniu tożsamości (19) otrzymujemy
| |

|
|
(26) |
Punkt o współrzędnych (25) nazywany jest środkiem krzywizny krzywej w jej punkcie
Miejscem geometrycznym środków krzywizny krzywej  o współrzędnych
o współrzędnych  jest krzywa
jest krzywa  zwana ewolutą krzywej
zwana ewolutą krzywej 
Odległość punktu od punktu jest tak zwanym promieniem krzywizny krzywej w jej punkcie Odległość tę oblicza się na podstawie wzorów (25) po uwzględnieniu tożsamości (20)
![{\displaystyle {\begin{aligned}\rho ^{2}&=(x_{*}-x_{o})^{2}+(y_{*}-y_{o})^{2}+(z_{*}-z_{o})^{2}\\[1ex]&=L^{2}\lambda _{o}^{2}+M^{2}\lambda _{o}^{2}+N^{2}\lambda _{o}^{2}=\lambda _{o}^{2}(L^{2}+M^{2}+N^{2}),\end{aligned}}}](./0f88eb63c142400a2a439117fc18362e6f31be2d.svg)
| |

|
|
(27) |
Krzywiznę krzywej określa wzór
| |

|
|
(28) |
Krzywizna  nazywana jest pierwszą krzywizną krzywej dla odróżnienia jej od drugiej krzywizny nazywanej torsją krzywej. Torsja jest miarą skrętu krzywej związanego z obrotem trójścianu Freneta dokoła osi stycznej. Obrót ten można obliczyć, wprowadzając do rozważań jednostkowy wektor
nazywana jest pierwszą krzywizną krzywej dla odróżnienia jej od drugiej krzywizny nazywanej torsją krzywej. Torsja jest miarą skrętu krzywej związanego z obrotem trójścianu Freneta dokoła osi stycznej. Obrót ten można obliczyć, wprowadzając do rozważań jednostkowy wektor


| |

|
|
(29) |
dzięki któremu torsję można zdefiniować wzorem
| |

|
|
(30) |
przy czym
| |

|
|
(31) |
dzięki temu, że po uwzględnieniu tożsamości Lagrange’a
| |
![{\displaystyle {\begin{aligned}\mathbf {H} ^{2}&=A^{2}+B^{2}+C^{2}=\\[1ex]&=(y^{'}z^{''}-z^{'}y^{''})^{2}+(x^{'}z^{''}-z^{'}x^{''})^{2}+(x^{'}y^{''}-y^{'}x^{''})^{2}=\\[1ex]&=(x^{'2}+y^{'2}+z^{'2})(x^{''2}+y^{''2}+z^{''2})-\\[1ex]&\qquad -(x^{'}x^{''}+y^{'}y^{''}+z^{'}z^{''})^{2}=\\&=\mathbf {t} ^{2}\mathbf {N} ^{2}-(\mathbf {t} \cdot \mathbf {N} )^{2}=(\mathbf {t} \cdot \mathbf {t} )(\mathbf {N} \cdot \mathbf {N} )-0={\tfrac {1}{\rho ^{2}}}.\end{aligned}}}](./aa2640cc05adaf223020ebcca1d2bf3daaf2655e.svg)
|
|
(32) |
Na podstawie (31) i dzięki temu, że  otrzymujemy
otrzymujemy
| |
![{\displaystyle {\begin{aligned}T&=(\mathbf {h} ^{'}\cdot \,\mathbf {n} )=\\[1ex]&=\rho ^{2}{\Big (}|\mathbf {H} |(\mathbf {H} ^{'}\mathbf {\cdot } \,\mathbf {n} )-|\mathbf {H} |^{'}(\mathbf {H} \cdot \mathbf {n} ){\Big )}=\\[1ex]&=\rho ^{2}|\mathbf {H} |(\mathbf {H} ^{'}\cdot \mathbf {n} )=\rho (\mathbf {H} ^{'}\cdot \mathbf {n} )=\\[1ex]&=\rho ^{2}(\mathbf {H} ^{'}\cdot \mathbf {N} )=-\rho ^{2}{\begin{vmatrix}x^{'}&y^{'}&z^{'}\\x^{''}&y^{''}&z^{''}\\x^{'''}&y^{'''}&z^{'''}\end{vmatrix}}.\end{aligned}}}](./ef88cb1cdecaf1bde30da042830f6bf4f5069e94.svg)
|
|
(33) |
Przykłady
1. Elipsa








 - ponieważ
- ponieważ 
2. Okrąg na płaszczyźnie o normalnej: 







- - ponieważ
3. Spirala na walcu kołowym, linia śrubowa – krzywa „nawinięta” na walec o promieniu  Spirala jest prawoskrętna wokoło osi
Spirala jest prawoskrętna wokoło osi 




gdzie  jest kątem nachylenia stycznej do osi pręta względem płaszczyzny
jest kątem nachylenia stycznej do osi pręta względem płaszczyzny  kołowego przekroju walca,
kołowego przekroju walca,



stąd





4. Parabola płaska









5. Parabola przestrzenna










Zerowanie się torsji wynika również bezpośrednio z faktu, że Rozważana krzywa w całości leży na swojej płaszczyźnie ściśle stycznej o normalnej 
6. Spirala Archimedesa









![{\displaystyle {}\qquad =\left[0,\;0,\;{\tfrac {a^{2}\sigma }{\alpha }}\scriptstyle {(t^{2}+2)}\right]=(0,\,0,\,1),}](./07f85374f6be092c654ea885773208d82f373eef.svg)

7. Spirala stożkowa – krzywa „nawinięta” na stożek kołowy.





![{\displaystyle x^{'}(s)={\tfrac {1}{\sigma }}[b\cos t-(a+bt)\sin t],}](./5ab26748a3aeb1a7e1e235cabaa31548cd56fec4.svg)
![{\displaystyle y^{'}(s)={\tfrac {1}{\sigma }}[b\sin t+(a+bt)\cos t],\quad z^{'}(s)={\tfrac {h}{\sigma }},}](./80b04a474d814787125cb049a766392203712725.svg)


![{\displaystyle \mu =(\sigma ^{2}+b^{2})(a+bt),\;\;\nu =b[2\sigma ^{2}-(a+bt)^{2}],}](./da13c813151670316c9d63b63d64928a534b6008.svg)

![{\displaystyle \mathbf {b} =\mathbf {t} \times \mathbf {n} ={\begin{vmatrix}\mathbf {i} &\mathbf {j} &\mathbf {k} \\{\frac {1}{\sigma }}\scriptstyle {[(b\cos t-(a+bt)\sin t]}&{\frac {1}{\sigma }}\scriptstyle {[b\sin t+(a+bt)\cos t]}&{\tfrac {h}{\sigma }}\\-{\tfrac {1}{\kappa }}\scriptstyle {(\mu \cos t+\nu \sin t)}&{\tfrac {1}{\kappa }}\scriptstyle {(\nu \cos t-\mu \sin t)}&-{\tfrac {bh}{\kappa }}\scriptstyle {(a+bt)}\end{vmatrix}}=}](./a132f054d0b953e3b6ca0e0cbddbeffc31f411bd.svg)
![{\displaystyle =\{{\tfrac {h\sigma }{\kappa }}\scriptstyle {[-2b\cos t+(a+bt)\sin t]},\;\;-{\tfrac {h\sigma }{\kappa }}\scriptstyle {[(a+bt)\cos t+2b\sin t]},\;\;{\tfrac {\sigma }{\kappa }}\scriptstyle {[2b^{2}+(a+bt)^{2}]}\;\},}](./1d819a498068efc57773de1e6bae8cd690d9eb84.svg)



![{\displaystyle z^{'''}(s)=-{\tfrac {b^{2}h}{\sigma ^{7}}}[\sigma ^{2}-4(a+bt)^{2}],}](./9c03a52d103b2ff48b4adbd364a34f0cbee19687.svg)

![{\displaystyle T=-{\begin{vmatrix}{\tfrac {1}{\sigma }}\scriptstyle {[b\cos t-(a+bt)\sin t]}&{\tfrac {1}{\sigma }}\scriptstyle {[b\sin t+(a+bt)\cos t]}&{\tfrac {h}{\sigma }}\\-{\tfrac {1}{\kappa }}\scriptstyle {(\mu \cos t+\nu \sin t)}&{\tfrac {1}{\kappa }}\scriptstyle {(\nu \cos t)-\mu \sin t)}&-{\tfrac {bh}{\kappa }}\scriptstyle {(a+bt)}\\-{\tfrac {1}{\kappa \sigma ^{3}}}\scriptstyle {(\gamma \cos t-\beta \sin t)}&-{\tfrac {1}{\kappa \sigma ^{3}}}\scriptstyle {(\beta \cos t+\gamma \sin t)}&-{\tfrac {b^{2}h}{\kappa \sigma ^{3}}}\scriptstyle {[\sigma ^{2}-4(a+bt)^{2}]}\end{vmatrix}}.}](./0a5dc0006e5d64feb6b5f0c71917faf6e013e92a.svg)
8. Spirala na walcu eliptycznym – krzywa „nawinięta” na taki walec o półosiach 














![{\displaystyle z^{'''}(s)={\tfrac {\gamma }{\sigma ^{7}}}\left[{\tfrac {4\gamma }{h}}\sin ^{2}t\cos ^{2}t-\sigma ^{2}(\cos ^{2}t-\sin ^{2}t)\right].}](./3167dc15dbc3cc72ec5aee3bede9084ac2882c78.svg)
9. Sinusoida „nawinięta” na walec kołowy.









10. Cykloida









![{\displaystyle {}\qquad =\left\{0,\;\;0,\;\;{\tfrac {1}{\kappa \sigma }}[(r-c\cos t)\psi -(c\sin t)\varphi ]\right\}.}](./e9458495686339fa5a0be96ce2665054adce5fcf.svg)
Wzory Freneta w 
Wzory Freneta zostały uogólnione dla więcej wymiarowych przestrzeni euklidesowych przez C. Jordana w 1874 roku.
Przypuśćmy, że  opisuje gładką krzywą w
opisuje gładką krzywą w  sparametryzowaną przez długość łuku oraz że pierwsze
sparametryzowaną przez długość łuku oraz że pierwsze  pochodnych jest liniowo niezależnych. Geometrycznie oznacza to, że krzywa nie zawiera się w żadnej hiperpłaszczyźnie o wymiarze
pochodnych jest liniowo niezależnych. Geometrycznie oznacza to, że krzywa nie zawiera się w żadnej hiperpłaszczyźnie o wymiarze  (ani w żadnej płaszczyźnie o niższych wymiarach). Wektory układu Freneta są bazą ortogonalną skonstruowaną przy pomocy ortogonalizacji Grama-Schmidta wykonanej na wektorach
(ani w żadnej płaszczyźnie o niższych wymiarach). Wektory układu Freneta są bazą ortogonalną skonstruowaną przy pomocy ortogonalizacji Grama-Schmidta wykonanej na wektorach 
W szczególności, jednostkowy wektor styczny jest pierwszym wektorem układu Freneta 

Wektor normalny  czasami nazywany wektorem krzywizny, wskazuje odchylenie krzywej od stycznej linii prostej. Jest zdefiniowany jako
czasami nazywany wektorem krzywizny, wskazuje odchylenie krzywej od stycznej linii prostej. Jest zdefiniowany jako

W standardowej formie, jednostkowy wektor normalny jest drugim wektorem układu Freneta  i jest zdefiniowany jako
i jest zdefiniowany jako

Wektor styczny i normalny w punkcie definiują płaszczyznę ściśle styczną w punkcie 
Pozostałe wektory układu Freneta (wektor binormalny, trinormalny itd.) są zdefiniowane w sposób analogiczny jako:

Funkcje o wartościach rzeczywistych  zdefiniowane jako:
zdefiniowane jako:

są nazywane krzywiznami uogólnionymi, przy czym symbol  oznacza iloczyn skalarny wektorów
oznacza iloczyn skalarny wektorów  i
i
W przypadku n-wymiarowym wzory Fréneta-Serreta mają postać:
 dla
dla 
W języku macierzy wyglądają tak: